


MSU has received a $1.2 million multiyear grant from the National Science Foundation to understand the security of autonomous vehicles’ vision systems
“Frequent phantom braking incidents can erode confidence in autonomous driving technologies,” said Qiben Yan, an assistant professor in the College of Engineering. “If riders perceive the technology as unpredictable or unreliable, they’ll be less likely to embrace it.”
Autonomous vehicles have a vision system, composed of multiple cameras and radar, that uses radio waves to gather information the car leverages to navigate the world around it. In previous research, Yan and his team were able to show how the cameras in these vision systems can be deceived by hackers.
“We projected lights into the cameras of the vehicle, and the camera recognized this as a false object and hit the brakes; it is surprising how fake things can be created out of nowhere,” said Yan. “We were also able to make an object in front of the car disappear to the camera so that the vehicle couldn’t see an obstacle, and the vehicle hit the object.”
This new NSF grant — with Associate Professor Sijia Liu and MSU Research Foundation Professor Xiaoming Liu from MSU, and in collaboration with Virginia Tech — will help the researchers expand their knowledge by studying how cameras see these phantom attacks and identify ways to keep these vision systems more secure and resilient against nefarious attacks.
Yan and his team are using some ideas from the field of neuroscience that study how human eyes and brains are tricked by optical illusions.
“We borrowed some ideas from human perception studies to understand the AI systems behind the vision system,” said Yan. “We know that vision systems can be deceived, and we want to program the AI model to see the environment and interpret the information more accurately.”
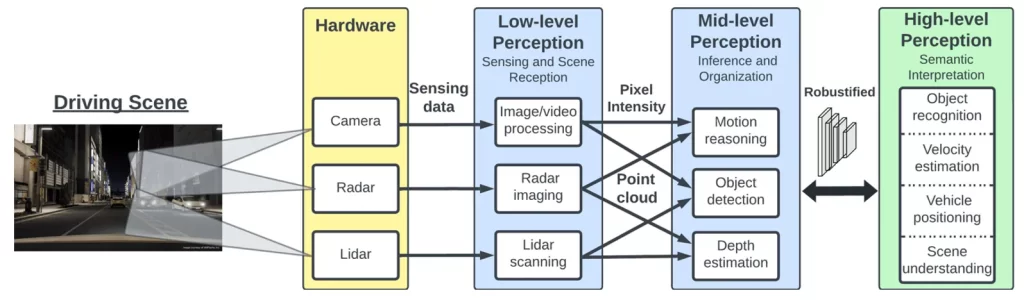
There are three levels of perception. Low-level perception means the vision system can see the scene in front of it, and mid-level perception recognizes what an object is and can determine how far away it is. In high-level perception, the system can recognize how fast an object is moving and how the object is part of the scene.
“We try to understand the evolution of perception from one level to the next,” said Yan. “Next, we want to develop a defense that ensures inherent security and to enhance the AI model that powers it.”
“Addressing the phantom braking issue is not just about refining the vision technologies, it’s about the overall viability, safety and success of autonomous vehicles in the future,” said Yan.
This story was originally published on MSUTODAY.
About the MSU Innovation Center:
The MSU Innovation Center is dedicated to fostering innovation, research commercialization, and entrepreneurial activities from the research and discovery happening across our campus every day. We act as the primary interface for researchers aiming to see their research applied to solving real-world problems and making the world a better place to live. We aim to empower faculty, researchers, and students within our community of scholars by providing them with the knowledge, skills, and opportunities to bring their discoveries to the forefront. Through strategic collaborations with the private sector, we aim to amplify the impact of faculty research and drive economic growth while positively impacting society. We foster mutually beneficial, long-term relationships with the private sector through corporate-sponsored research collaborations, technology licensing discussions, and support for faculty entrepreneurs to support the establishment of startup companies.
Do you want to learn more about the Mobility research being done at MSU? Click HERE