


In fruit orchards, timing is critical. When labor is scarce or costly, fruit may remain unharvested, causing lost income and risking the relocation of specialty crop production from Michigan to regions with larger orchards and more workers.
“If we don’t automate critical tasks quickly, crops will remain on trees or rot. Industries will leave, and so will our domestic production,” says Zhaojian Li, Red Cedar Distinguished Associate Professor at Michigan State University’s (MSU) Department of Mechanical Engineering.
“Growers urgently need automation for harvesting and other operations,” explains Kyle Lammers, a Ph.D. student in MSU’s Electrical and Computer Engineering program. “This isn’t just ‘nice to have.’ It’s essential to sustain the industry. Automation is needed, and it’s needed right now.”
The stakes are local. Michigan has already lost specialty crop industries due to labor challenges. Without harvest labor, production consolidates into fewer, larger operations or relocates. 
Challenge: A Shrinking Workforce and A Brief, Unforgiving Harvest Season
Unlike commodity crops that have been mechanized for decades, apples and other specialty crops remain mostly hand-picked. In the U.S., labor is the highest cost in apple production and increasingly hard to secure when needed. Harvest labor is the largest portion of orchard labor requirements.
“Many underestimate how challenging apple picking is. Real orchards have changing light, complex backgrounds, branches, leaves, and multiple obstructions,” says Li.
Previous systems were designed for ideal conditions with clean lighting, minimal foliage, and predictable fruit placement. They struggled in commercial orchards where apples hide behind leaves, cluster together, and appear differently under backlighting, shade, or direct sun.
As Lammers explains, “Existing robots were designed for ideal orchard conditions, not real commercial orchards. Some orchard conditions cannot be simulated indoors. That is a major gap.” 
Breakthrough Approach: Build A Robot That Performs in Real Orchards, Not Just Ideal Ones
The team’s answer is an apple-harvesting robot uniquely designed to thrive in unpredictable, real-world orchard conditions, which had been lacking in earlier automation attempts.
“Taking something from initial tests to actual demonstrations in the orchard — that’s what builds credibility,” says Minami Yoda, Chair of MSU’s Department of Mechanical Engineering. “It proves we’re not just in the ivory tower — the work we do has real-world impact.”
At its core is a simple idea: a machine that can see apples reliably in outdoor conditions, reach them using simplified movement schemes, and pick them gently enough to protect quality.
The solution is a dual-arm robotic apple harvester with two compact arms working side by side to reduce harvest time. It uses a perception system combining a depth-sensing camera and an active laser-camera scanner to improve accuracy under challenging lighting and foliage conditions.
To identify apples from sensory input, the team uses a deep learning method called occluder–occludee relational network (O2RNet) to enhance detection. Then, an RGB-D camera, capturing color and depth, estimates and refines each apple’s location in 3D space, enabling accurate picking in real orchard conditions.
“Our system uses a camera, like human eyesight, to locate fruit and judge distance. AI then determines how to reach, pick, and deliver the apple to a drop point,” says Lammers. 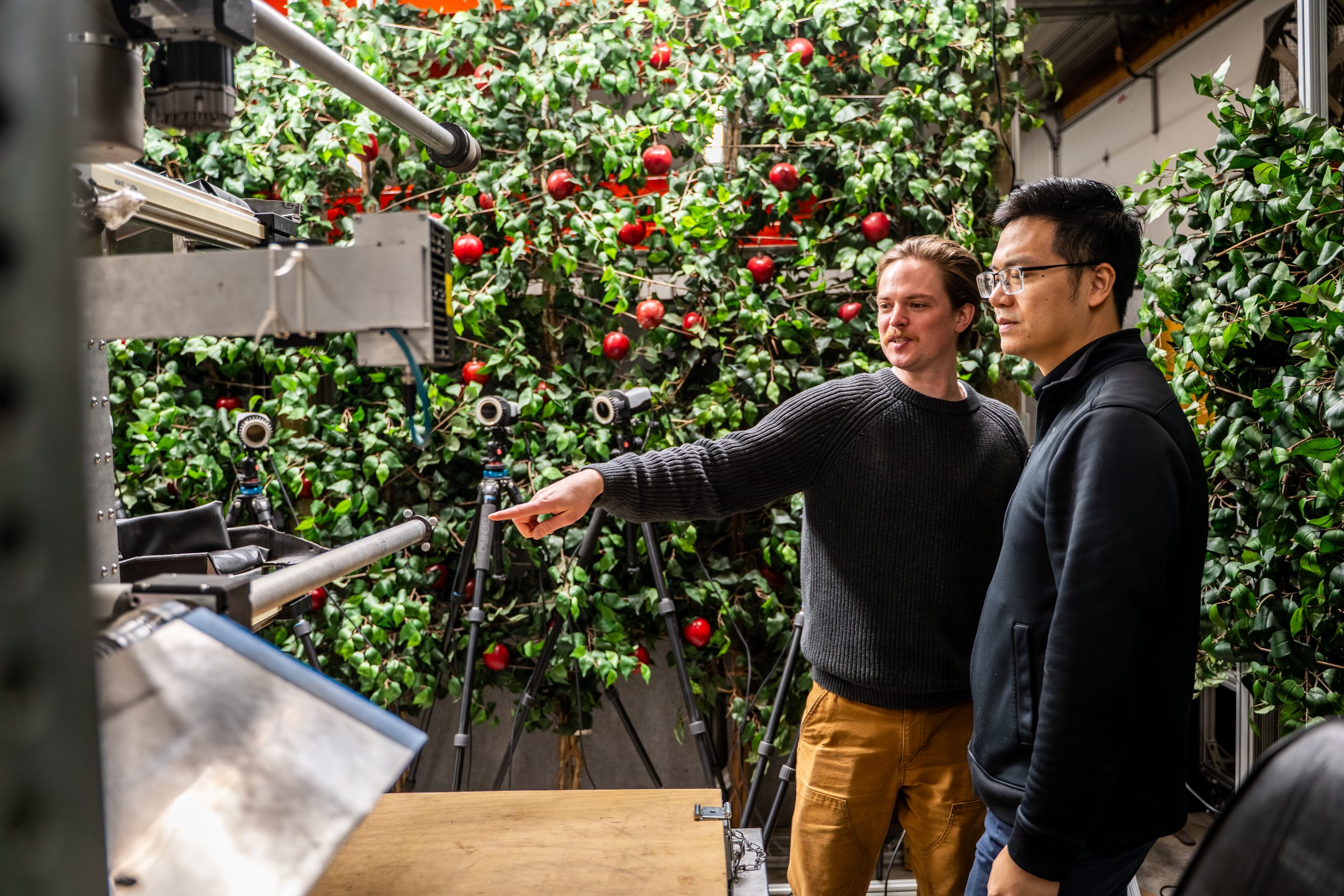
MSU Innovation Center: The Bridge from Lab Success to Orchard Reality
The robot’s story is not just about the team’s creation but also how MSU’s Innovation Ecosystem bridged the gap to real-world application.
“MSU Technologies helped us secure our IP, provided commercialization guidance, connected us to translational funding like the MEDC supported MTRAC grant, and introduced us to industry partners,” says Li.
The MSU Research Foundation also helped power that pathway by supporting the T3N Mentor-in-Residence (MIR) program, which connects teams with commercialization mentors who help assess market opportunity, sharpen use cases, and accelerate startup planning.
In 2025, Li and Lammers co-founded AgriDynamics Robotics, crediting the MSU Innovation Center and MSU Research Foundation for critical support in bringing their technology to market.
“We’re engineers,” says Lammers. “We come from a very technical background, and they helped us reach out to venture capital, improve our pitches, and communicate effectively with potential investors.”
Together, the Innovation Center and Foundation’s support reduced friction between research and deployment.
Yoda also emphasizes the importance of the Innovation Center and the MSU Research Foundation. “Zhaojian and Kyle have received significant support through MSU’s innovation ecosystem. Without it, much of this would not have been possible.” 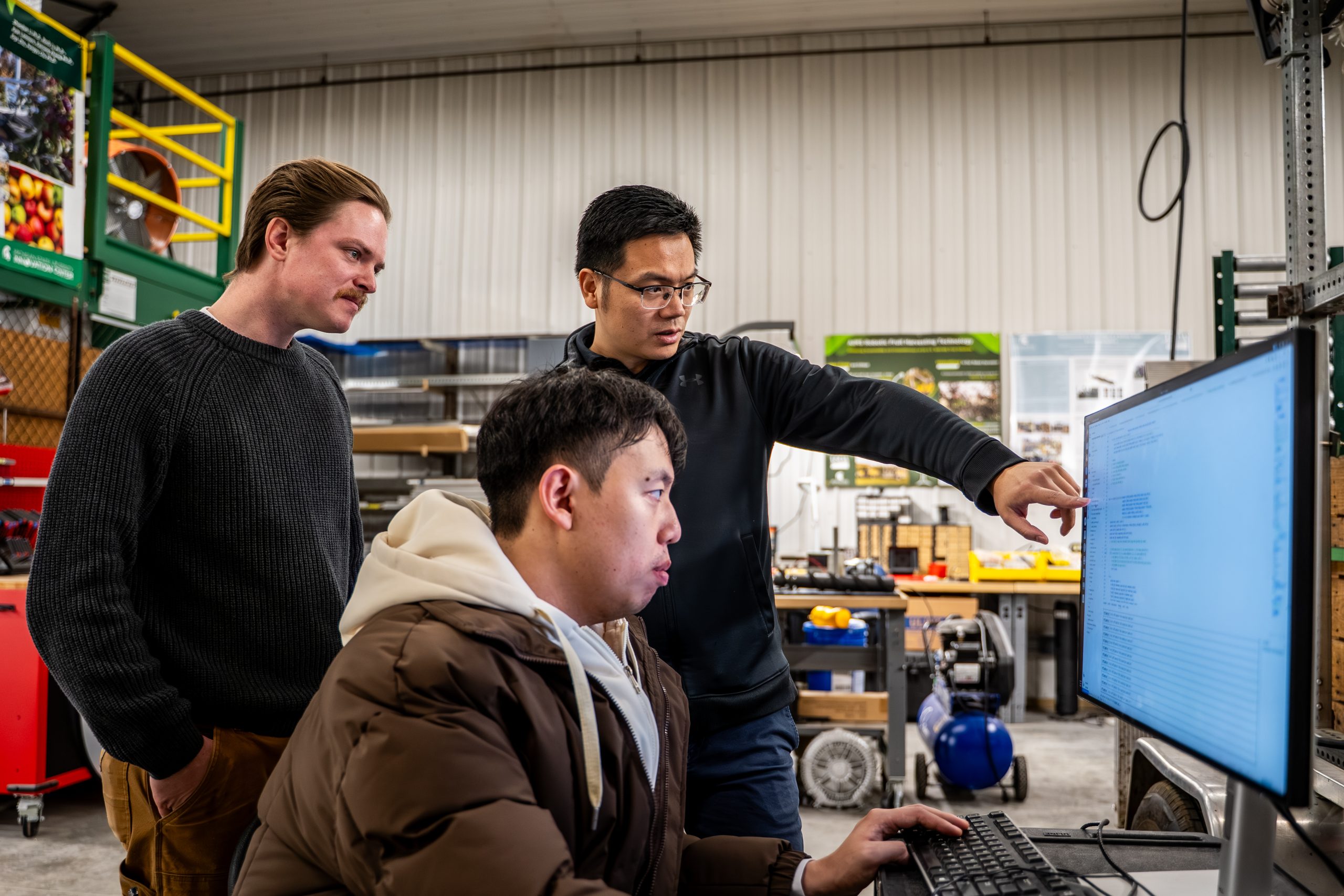
Keeping Specialty Crops Rooted in Michigan and Ready for the Future
Looking to 2026, the team aims for modularity so the platform can handle other crops and orchard tasks, such as pruning or targeted spraying, by swapping attachments. This versatility makes it economically viable for growers who cannot afford costly equipment that remains idle most of the year.
“Economic viability matters. Apples are harvested only 90 to 100 days a year, so we are building a versatile platform that can work across crops and other orchard tasks,” says Lammers.
If the long-term outcome is that Michigan continues to grow and harvest high-value specialty crops competitively, it is also a land-grant story: integrated engineering technologies designed for orchard realities and tested under sun glare, wind, and dense foliage until dependable.
Tom Herlache, Assistant Director of MSU Technologies praises Li and Lammers on their dedication to solving and issue facing Michigan’s growers and embodying MSU’s Land Grant Mission. “It’s been my pleasure to work with the apple robotics team as they’ve developed their robot towards a marketable product, including on several internal technology development grants that improved robot functions needed by growers. The State of Michigan partially funds the technology development grants, and that funding will soon result in benefits to our state’s fruit growers.”
“Apples are extremely important to Michigan, and this is a shining example of engineering giving back through our land-grant mission,” says Yoda. “By bridging research and commercialization, we are not only addressing immediate needs but also creating a resilient future for Michigan agriculture.”
###
Partner with MSU to Help Revolutionize Crop Harvesting
The MSU Innovation Center is seeking companies and organizations interested in agricultural robotics, autonomous harvesting systems, and specialty crop automation.
Whether you’re exploring sponsored research, licensing opportunities, or co-developing dual-arm robotic harvesters, AI-powered fruit detection systems, or modular orchard automation platforms, we’re ready to collaborate.
Visit innovationcenter.msu.edu or contact us to start the conversation.
About the MSU Innovation Center
The MSU Innovation Center supports the commercialization of research, startup creation, and corporate partnerships at Michigan State University. Through technology transfer, venture creation, and industry engagement, the Innovation Center helps transform Spartan research and ideas into market-ready solutions that benefit society and strengthen Michigan’s economy. Learn more at innovationcenter.msu.edu